our robots
people - research - publications - teaching - robots - robot movies - links
Chris Adams
|
MOBILE
ROBOTICS
RESEARCH
GROUP
our robots people - research - publications - teaching - robots - robot movies - links |
Chris Adams |
Lego vehicles 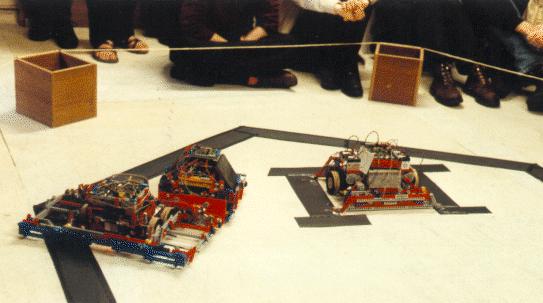
Robot competitions |
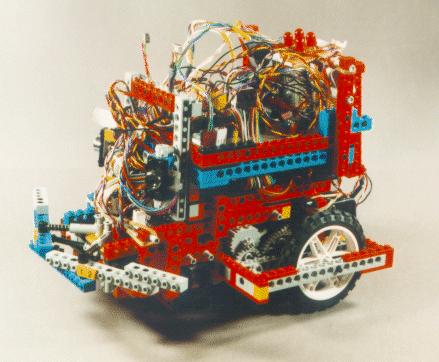
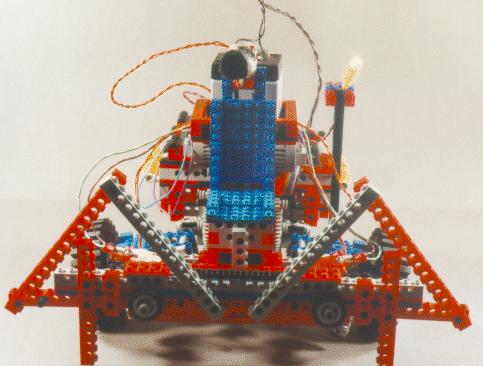
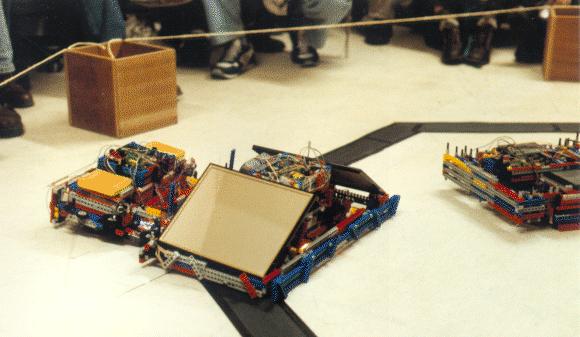
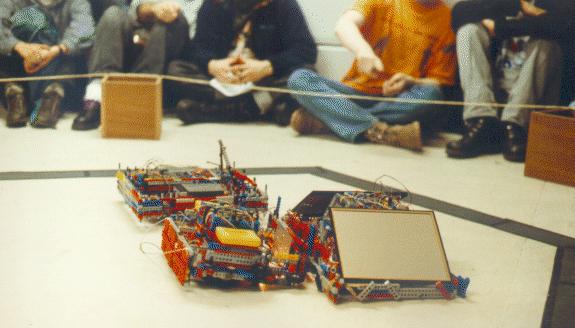
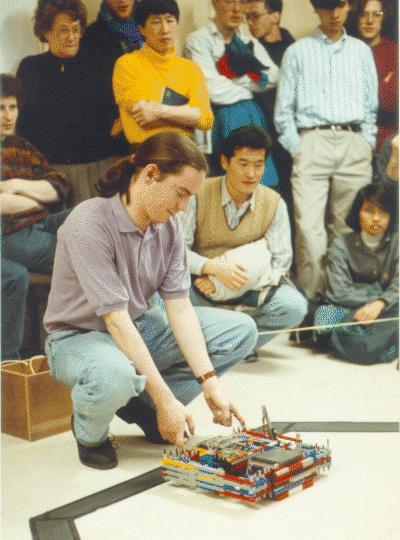
Lego Vehicles
We build a large number of autonomous Lego vehicles. They are
controlled by 68000-like `brain bricks', which are programmed in C, or
in a high-level pseudo-parallel language called CPL developed within
the department. The brain bricks can be connected to Lego motors, as
well as a variety of sensors. Sensors used for teaching vehicles are
infra-red range sensors, bumper microswitches, whiskers,
light-dependent resistors, and a hall-effect sensor.
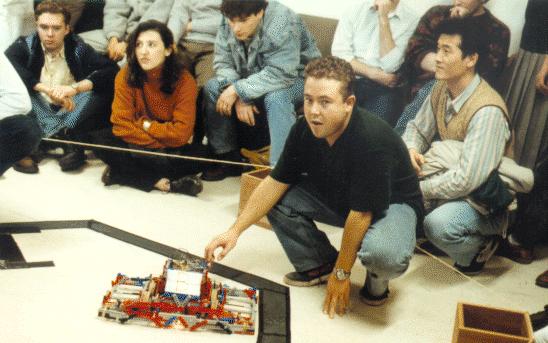
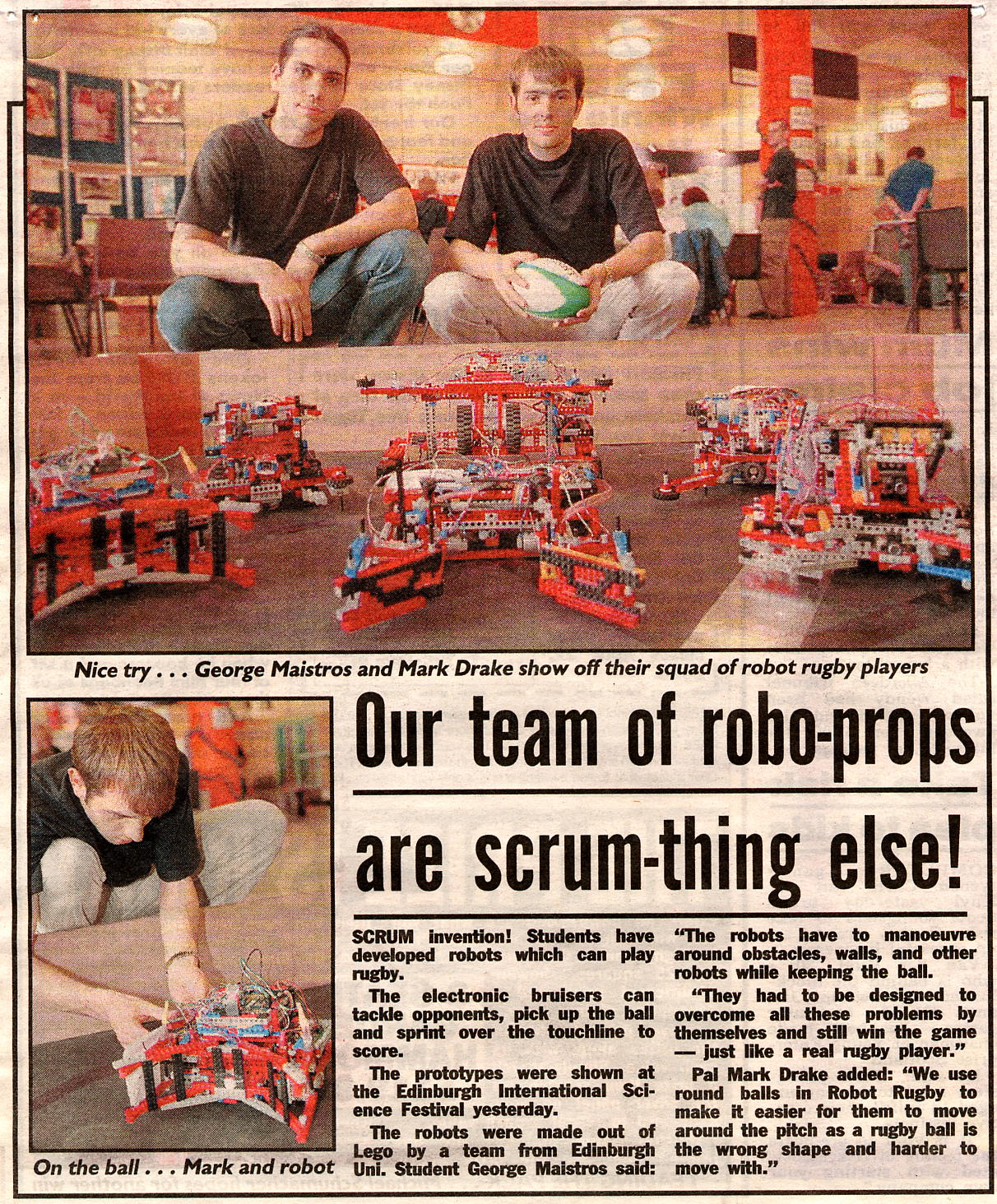
Research vehicles normally include other sensors also. The use of Lego allows the morphology (shape) of the vehicle to be changed easily. This allows us to investigate the relationship between morphology, environment, and behaviour. These vehicles are used for research and as part of our Intelligent Sensing and Control course. Lego robots built as the practical part of this course participate in a competition, currently rubgy although in previous years we've done Sumo wrestling instead, or had a `most interesting robot' competition.
Visit the
The local press saw our rugby-playing robots in April, 2000. The Sun article is 0.69Mb, and the The Daily Record is 0.96Mb. Smaller versions can be downloaded: The Sun (0.12Mb), and the The Daily Record (0.2Mb).
|
|

Research Legos |
Our research projects involving Lego robots have included
|
|

Gillespie |
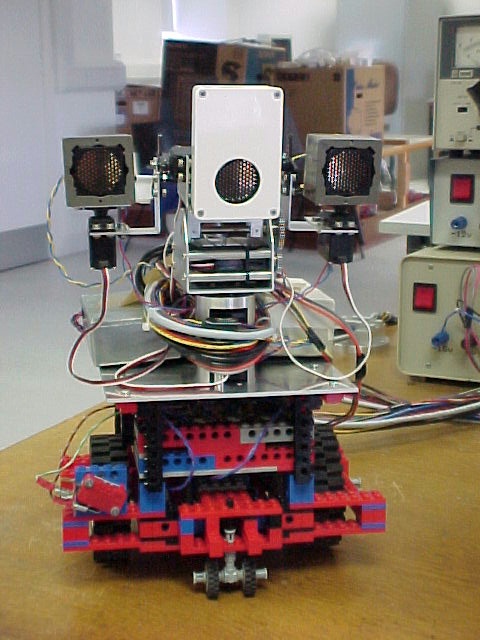
Gillespie
Gillespie is our newest research robot. It is a Real World Interface
B21 mobile robot with a video camera on a pan-tilt head, infrared,
sonar and bump sensors, and PCs running Linux and programmed in C. It has been used for investigating optical flow and face recogition and is currently being used to model social interactions and social learning with a human. |
|

RoBat |
RoBat RoBat is a 6 degree of freedom biomimetic sonar head mounted on a mobile robot. It is used for investigating a `constant frequency' bat's sensorimotor system for obstacle avoidance and prey capture behaviours. | |

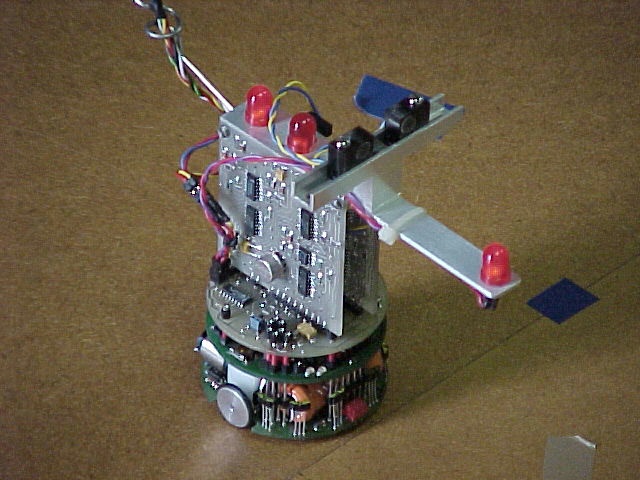 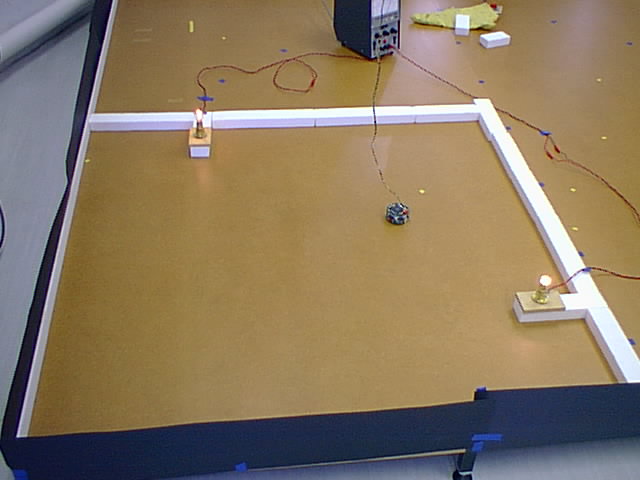
Kheperas |
Kheperas
The Khepera robots are very small 2-wheeled circular mobiles made by
K-Team
that are powered
and controlled by an overhead umbilical. They have been used as robot
crickets, for learning by imitation and other communication tasks.
| |

Koalas |
Koalas Koalas are slightly bigger 6-wheeled robot vehicles also made by K-Team. | |
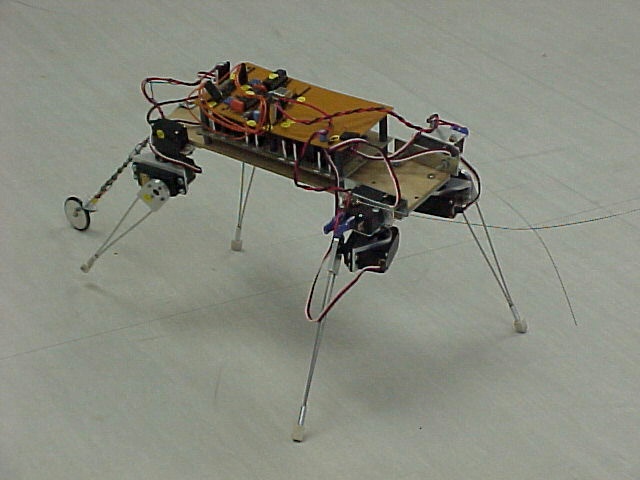
Walking robots |
Walking Robots We have developed some walking robots including a four-legged walker which proved difficult to control (it fell over). | |
| The Cat For the cat project, we are putting together a robust robot of our own. The purpose of the cat is survival - it has no `tasks' in the normal sense. The cat will be controlled by an improved version of the `brain bricks' used by the LEGO robots, with added transputers. This work has no grants associated with it so it proceeds slowly in student-project-sized pieces. | ||
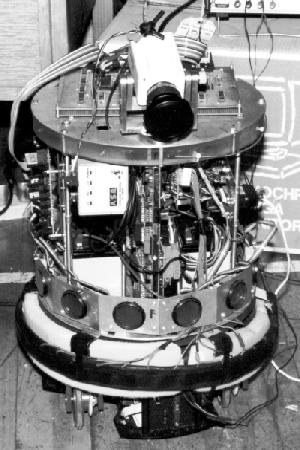
Ben Hope |
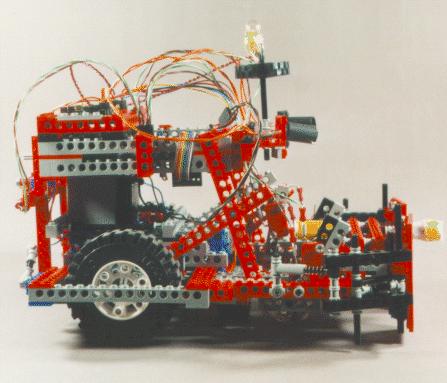
Bill and Ben
Ben Hope and its successor Bill are quite substantial `steerable-base'
robots. They carry a video camera and several T800 transputers (RISC
microprocessors with fast inter-processor communication), so that they
can do simple real-time vision. The transputers are programmed in
Parallel C or Occam. Ben also has a belt of ultrasonic range sensors
around its waist. Ben was used for maze-following and organising
chairs. Bill was built for experimenting with a biologically-inspired control model, but never quite reached active service.
|
|
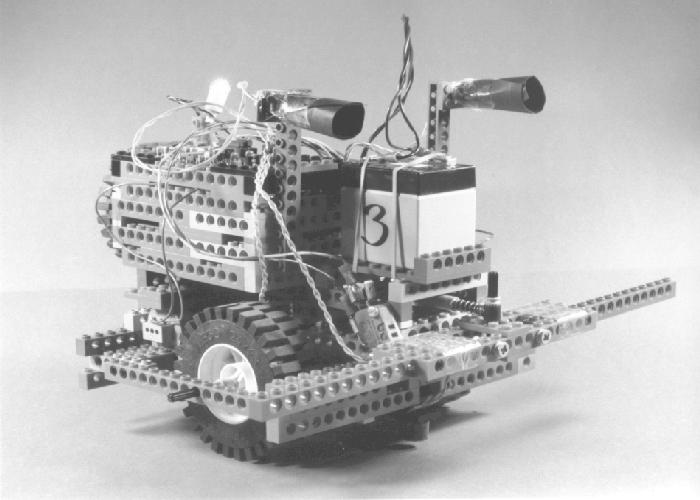
 Cairngorm, the 3rd RUR |
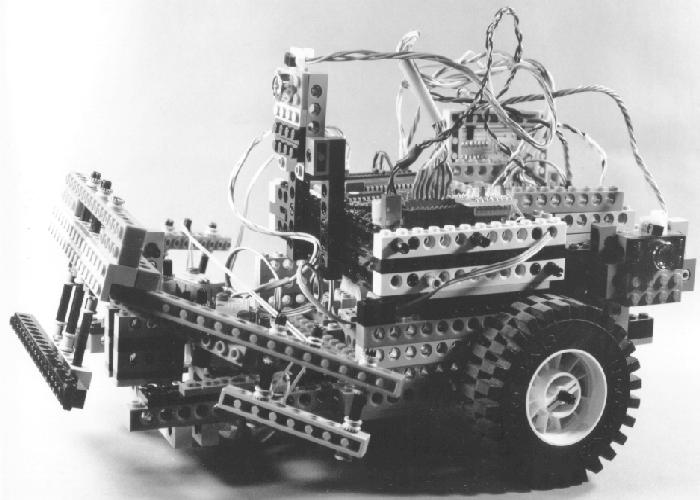
Really Useful Robots
The Really Useful Robot (RUR) vehicles were constructed out of
Fisher-Technic and controlled by 68000-ish `brain bricks', which were
programmed in C. The brain bricks connected to FT motors, as well as
a pair of binary whiskers. This peripheral configuration provided the
RURs with crude odometry and short-range tactile information. Really Useful Robots were used to navigate mazes, sometimes building maps of the environment as part of that process. |
Contact: Bridget Hallam Last updated: 22/12/00
{kind=link}
{kind=link}
{kind=link}
{kind=link}